
BlogSpot
Check them Out here !

Why Traditional Operator Training Fails — And What’s Replacing It
Industrial teams today are facing a challenge no one saw coming: the old training model simply cannot keep up with modern equipment, modern processes, and modern workforce expectations. For decades, operator training followed the same pattern—classroom theory, shadowing senior operators, slow hands-on exposure, and eventually, independent operation. But the environment has changed, and the system hasn’t.
The result is a quiet crisis across manufacturing, energy, utilities, logistics, and heavy industries.
Operator readiness is dropping, training times are increasing, and skill gaps are growing wider than ever.
And the numbers reflect it. Analyst reviews across multiple industrial sectors show that up to 60% of operator training programs fail within the first 12 months—not because employees are unqualified, but because the training framework itself is obsolete.
Let’s break down why this is happening—and more importantly, what the world’s most advanced manufacturing organizations are doing to fix it.
Why Traditional Operator Training Fails
Traditional approaches were built around assumptions that no longer apply. Equipment is more complex. Processes are more automated. Downtime is more expensive. Safety standards are stricter. And workforce turnover is faster.
Classroom Theory Doesn’t Translate to the Floor
Operators often spend days or weeks in classrooms before ever touching equipment. But industrial work is hands-on, sensory, and situational.
Without context, knowledge doesn’t transfer, and retention collapses after only a few weeks.
On-the-Job Training Creates Risk
Shadowing experienced operators is valuable—but it introduces serious limitations:
⦁ New workers learn on live equipment
⦁ Mistakes become expensive
⦁ Senior staff must divide attention
⦁ Safety margins shrink
When efficiency and uptime matter, this is a dangerous bottleneck.
Senior Operators Cannot Mentor at Scale
Experienced technicians are retiring faster than they can be replaced. Those who remain are responsible for:
⦁ Production output
⦁ Workflow monitoring
⦁ Troubleshooting
⦁ Documentation
⦁ Training
Training becomes the lowest priority—because production deadlines always win.
Emergency Scenarios Cannot Be Practiced Safely
Nearly every major safety incident involves one common factor:
the operator had never experienced that scenario before.
Traditional training cannot simulate:
⦁ Equipment failures
⦁ System faults
⦁ Hazardous conditions
⦁ High-pressure response
So workers only learn how to handle emergencies after they’ve happened. By then, it’s too late.
The Rise of AR/VR Simulation Training
A new training model is emerging—one driven by simulation-based learning, digital twins, and immersive technologies that allow workers to train on exact virtual replicas of real equipment.
And the results are exceptional.
Why AR/VR Is Transforming Industrial Training
1. Zero-Risk, High-Retention Learning
Operators can practice:
⦁ Startup and shutdown
⦁ Fault response
⦁ Manual adjustments
⦁ High-risk tasks
⦁ Emergency scenarios
without any danger, downtime, or equipment wear.
2. Digital Twins Make Training Real
Modern simulators replicate:
⦁ HMI interfaces
⦁ Control logic
⦁ Physics
⦁ Environmental factors
⦁ Equipment behavior
Operators train on an exact copy of what they’ll use on the job.
3. Unlimited Repetition Builds Muscle Memory
One thing traditional training lacks?
The ability to repeat complex tasks dozens of times until performance becomes automatic.
Simulation delivers that instantly.
4. Performance Data Reveals Skill Gaps
AR/VR systems track every action:
⦁ Task completion time
⦁ Error patterns
⦁ Correct vs incorrect sequence steps
⦁ Reaction speed
⦁ Situational awareness
This provides quantifiable evidence of who is ready—and who needs further development.
5. Training Time Drops 30–50%
Nearly every industrial sector reports faster training cycles when simulation is added.
One organization deploying VR for heavy equipment training recorded:
⦁ 25% higher training effectiveness
⦁ 40% reduction in cycle time
⦁ Zero equipment damage during onboarding
That is the power of immersive learning.
The New Standard: Simulation-First Operator Development
Across manufacturing, oil & gas, aviation, energy, logistics, and automotive—simulation is becoming the baseline model for workforce development.
Forward-thinking industrial organizations are moving to:
⦁ AR/VR onboarding
⦁ Digital twin practice modules
⦁ Emergency scenario simulations
⦁ Competency-based certification
⦁ Continuous skills monitoring
This is not an experimental trend.
It is the foundation of the industrial workforce of the next decade.
Conclusion
Industrial operations can no longer afford slow, inconsistent, risky training methods. The companies who survive—and thrive—will be the ones who build training ecosystems based on simulation, data, and safe, repeatable practice.
Traditional training isn’t broken because people changed.
It’s broken because the world changed—and training didn’t.
AR/VR simulation is the replacement.
And the shift is happening faster than anyone expected.
FAQs
1. Is AR/VR really accurate enough for industrial training?
Yes. Modern digital twins reproduce equipment behavior, physics, and interfaces with near-identical realism.
2. Does simulation reduce real-world readiness?
No—studies show simulation-trained operators perform better and adapt faster on live equipment.
3. What industries are adopting this first?
Manufacturing, oil & gas, aviation, mining, energy, and logistics.
4. How expensive is simulation training?
Costs vary, but most companies recoup investment within 6–12 months from reduced downtime, faster training, and fewer errors.
5. Can AR/VR replace traditional training completely?
Not entirely—but it replaces the riskiest and slowest parts while making the entire process more efficient.
Inside the Design Process: How Multi-Vehicle Driving Simulators Actually Work
Executive summary
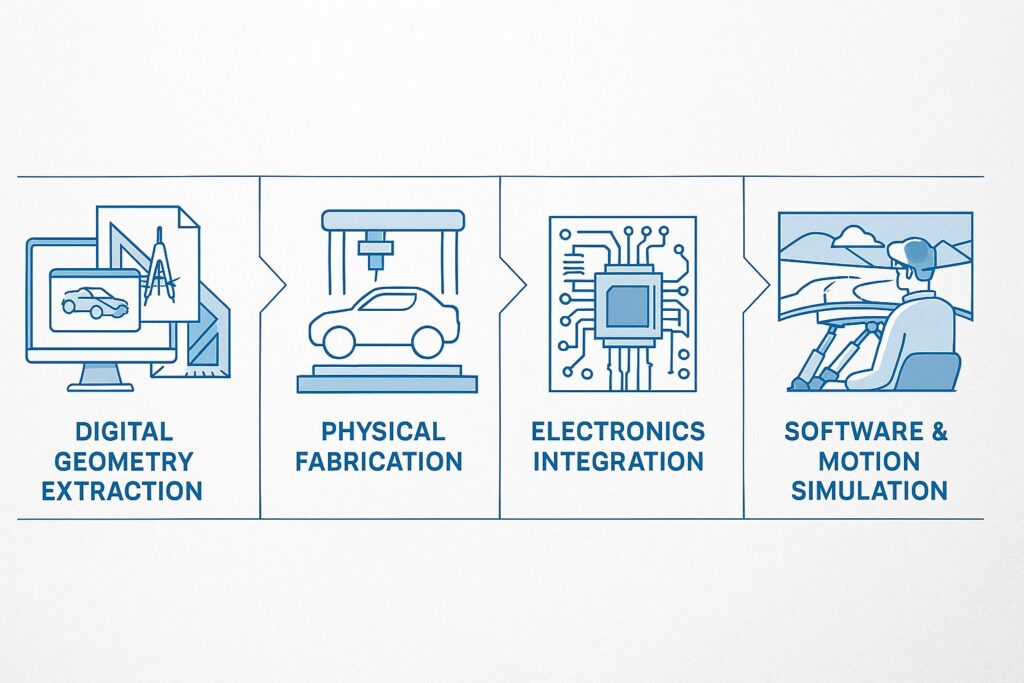
We design and build multi-vehicle driving simulators to reproduce the exact look, feel, and behavior of heavy machinery — tractors, earthmovers, forklifts — so operators can train safely and efficiently. Achieving operational realism requires a deliberate multi-disciplinary process: high-fidelity digital geometry extraction, precision fabrication, robust electronics integration, realistic software engines and motion systems, and rigorous validation and metrics. This article walks through each phase in detail, provides practical implementation guidance, and explains why simulators deliver measurable improvement in operator performance and equipment safety.
Digital geometry extraction: the foundation of realism
The fidelity of a simulator starts with accurate geometry. We reverse-engineer every control surface, dashboard element, seat position, pedal travel, and sightline to millimeter tolerance. That begins with CAD sources where available (native CATIA or SolidWorks assemblies), and with detailed measurement where originals are undocumented.
Typical steps:
⦁ 3D scanning & photogrammetry: We capture external shapes, dashboard reliefs, switch bezels and ergonomic offsets. Dense point clouds become the baseline for model cleanup.
⦁ CAD import and reconstruction: Point clouds are converted into NURBS or polygonal surfaces, then rebuilt as fabrication-ready CAD. We preserve kinematic relationships (e.g., steering column tilt, pedal articulation).
⦁ Control ergonomics mapping: We measure reach envelopes, button pressure profiles, and tactile detents. These parameters feed force-feedback and haptic profiles later in the process.
⦁ Human factors validation: Operators evaluate early mockups to confirm sightlines, mirror placement, and hand/foot interaction before final fabrication files are locked.
The result is a digital twin that is not just visually accurate but kinematically correct — essential for building muscle memory.
Physical fabrication: turning models into a believable cockpit
A convincing simulator cockpit must feel like the real vehicle. This requires careful material selection, tactile detailing, and precise assembly.
Key fabrication activities:
⦁ Rapid prototyping & 3D printing: Complex bezels, knobs, and ergonomically shaped parts are 3D printed (typically in reinforced ABS or nylon) so operators can interact with authentic geometry.
⦁ Sheet metal work and CNC machining: Structural components and mounting plates are breakout-machined for repeatable rigidity and alignment. Mechanical tolerances are set to match original equipment specifications.
⦁ Surface finishing and acoustic treatments: Faux materials, matched paint, rubberized textures, and dampening achieve the correct tactile and audible feedback. Acoustic panels and subframe isolation emulate engine and hydraulic noise characteristics.
⦁ Assembly jigs & fit checks: We use assembly fixtures to ensure repeatable alignment of controls and displays across multiple simulator units.
Fabrication is an iterative process: operators validate prototypes, we iterate on tactile feel, then finalize for volume or single unit builds.
Electronics integration: capturing operator input in real time
A simulator’s responsiveness depends on low-latency, high-fidelity capture of operator inputs and feedback.
Core electronics design elements:
⦁ Custom input controllers: For highly specific controls (e.g., continuous-travel throttle levers or multi-detent gear selectors) we develop microcontroller boards (Arduino-class or ARM Cortex-M) with precision ADCs and quadrature encoders.
⦁ Signal conditioning & safety: Inputs are buffered and filtered, with hardware debouncing, current sensing for force feedback, and fail-safe states to prevent spurious commands.
⦁ Haptic and force-feedback actuators: Steering wheels, pedals, and levers include torque motors, linear actuators, or solenoids tuned to match force curves measured from real vehicles.
⦁ Networked IO and determinism: We implement industrial network protocols (EtherCAT, CAN, or UDP/real-time Ethernet) where determinism is required to ensure synchrony between motion platforms and visual simulation.
⦁ Latency budgeting: The electronics stack is designed for total control-to-render latency under 50 ms (ideally <20 ms for critical controls) to avoid motion sickness and preserve realism.
Integration testing includes signal loop checks, end-to-end latency measurement, and EMI/EMC validation for reliability in noisy industrial environments.
Software & motion: rendering physics, visuals, and kinesthetic cues
Software binds the geometry and electronics into an experience that behaves like the real world.
Critical software components:
⦁ Realistic physics engines: We use Unity, Unreal, or custom physics stacks with vehicle dynamics models that incorporate mass distribution, hydraulic actuators, ground interaction models (soil mechanics for earthmovers), and articulated body kinematics.
⦁ Digital twin fidelity: Engine models ingest real equipment parameters — inertia, damping, control deadbands — possibly exported from OEM control models or measured empirically in field tests.
⦁ Environmental simulation: Scene rendering includes terrain deformation, changing traction conditions, visibility/fog, and multi-vehicle traffic to allow convoy or shared worksite scenarios.
⦁ Motion platforms: Six-degree-of-freedom (6-DOF) platforms reproduce translational and rotational accelerations. Motion cueing algorithms translate simulated accelerations into platform positions while minimizing perceptual conflicts.
⦁ Visuals & latency management: High-refresh rate displays, projection domes, or wrap screens with asynchronous timewarp techniques reduce perceived lag. Foveated rendering and LOD management keep frame rates high.
⦁ Intervehicle and networked scenarios: For multi-vehicle training we implement synchronized timebases, networked physics, and collision synchronization so trainee actions influence other simulators in real time.
Software pipelines also support scenario scripting, fault injection, and telemetrics export for post-session analysis.
Validation, metrics and training integration
A simulator is only useful if it demonstrably improves skill and safety.
Validation steps:
⦁ Quantitative performance metrics: Track task completion time, error rates, control smoothness (jerk/acceleration profiles), and response to fault sequences.
⦁ Comparative testing: Run controlled studies comparing simulator-trained cohorts to traditionally trained groups on objective tasks (e.g., precision trenching or safe approach distances).
⦁ Scenario coverage: Ensure each critical failure mode and high-risk scenario is repeatable and instrumented (e.g., hydraulic failure, stuck implement, rollover warning).
⦁ Training curriculum integration: Map simulator modules to competency frameworks. Use LMS integration to gate progression, issue certificates, and record remediation assignments.
⦁ Continuous improvement: Telemetry from training sessions refines physics models and updates fabrication/haptic parameters to close the loop on realism.
Our projects consistently report measurable outcomes: training time reductions, lower in-field damages, and improved emergency responses.
Practical deployment considerations: cost, timelines, and scaling
Realistic simulators are investments; planning for cost and scale is essential.
Considerations include:
⦁ Unit cost drivers: Motion platform class, visual subsystem (projector vs. LED wrap), number of tactile controls, and digital twin fidelity are main cost levers.
⦁ Timeline: Typical development from concept to pilot: 3–6 months for a single-vehicle simulator; 6–12 months for multi-vehicle systems with network synchronization.
⦁ Scaling approach: Deploy pilot units for high-impact roles, validate ROI, then scale with standardized cockpits and modular electronics to control per-unit costs.
⦁ Maintenance & support: Field-replaceable electronics modules, spare actuator kits, and remote diagnostics decrease downtime and lifecycle cost.
⦁ Regulatory and safety alignment: Ensure training records tie to certification or regulatory requirements where applicable (e.g., mine safety, heavy equipment operator licensing).
Case snapshot: multi-vehicle earthmover simulator
In a recent project we delivered a networked simulator suite for tractor and earthmover operators. Highlights:
⦁ Digital twin fidelity allowed operators to feel realistic implement response and terrain interaction.
⦁ Synchronized multi-unit scenarios enabled convoy coordination and yard logistics exercises.
⦁ Measured outcomes: 30% improvement in field performance metrics and near-zero machine damage during onboarding.